股票代码301512
中文/English
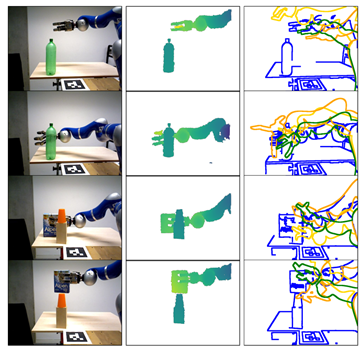
通过视觉反馈控制机器人的运动,利用计算机视觉技术识别目标物体并估计其位置和方向,通过比较当前位置与期望位置,计算控制信号以驱动机器人运动到期望位置。这种技术不仅提高了机器人的自主性和精确性,还在工业生产、服务机器人、无人驾驶等领域展现出巨大的应用潜力。