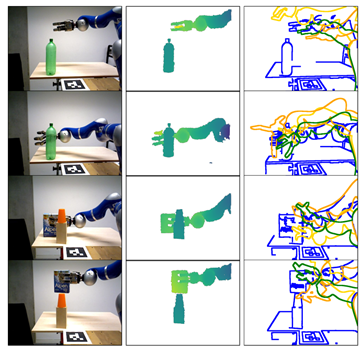
By controlling the movement of a robot through visual feedback, utilizing computer vision technology to identify target objects and estimate their positions and orientations, and by comparing the current position with the desired position, control signals are calculated to drive the robot to the desired location. This technology not only enhances the autonomy and precision of robots but also demonstrates enormous application potential in fields such as industrial production, service robots, and autonomous driving.


Copyright © SHENZHEN INTELLIGENT PRECISION INSTRUMENT CO., LTD.
